Gyro Symposium | Composite Propeller | Hobbies| Site Map
JT-15 Multicopter and MultiCalc program? |
Several large company projects have appeared in recent years, the Chinese Ehang 184, the German Volocopter, AirBus Pop Up, Surefly, Passenger drone and many others. Individual persons and homebuilders also have created ingenious multicopter designs and flown them around, the Flying Bathtub, the Sky Hopper, the chAIR, the Kitty Hawk, Elkins copter, Korea made copter and others.
This made me so curious about the possibilities of the electric multicopter that I decided to design my own 3D multiopter model, the JT-15. Since I already had modeled and built the JT-5 autogyro with a very low drag fuselage it was only natural to use it for the multicopter project.

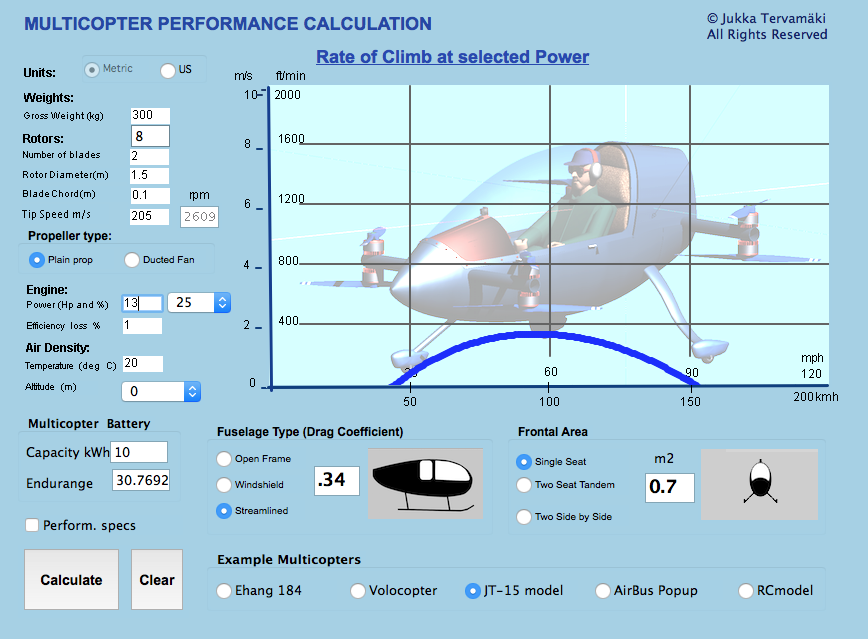
MulticopterCalcMac
MulticopterCalcWin
The MultiCalc programs give rather optimistic results. One way to adjust this is to add a bigger efficiency loss value. Multicopter propellers are relatively small and, therefore, have higher tip losses and profile drag losses.
ELECTRIC COMPONENTS
Searching the available Li-ion batteries I found that the Tesla 16850 EV is superior in energy density. With two Tesla batteries I could have 10,6 kWh of energy for a weight of 50 kg. This could give the JT-15 an endurance of 30 minutes at 25% cruising power. The two batteries fit well in the compartment behind pilots seat with enough space for the electric controller, too. At 80% power the JT-15 could still climb vertically about 10 m/s for a few minutes.
As to the electric motors one alternative is the Turnigy Rotomax 150 cc, 9,8 kW motor. 8 motors would weigh about 20 kg together.
THE CONTROL SYSTEM:
Looking at the completed multicopters one can notice that many of
them are flown using a remote control unit. The units are inexpencsive
and readily available. For the JT-15 this would be the choice of control
for the first unmanned test flights. However, in the final version I
strongly prefer a normal airplane like system of a control stick for the
right hand and power lever for the left hand.
THE LANDING GEAR
I designed fiberglass landing gear
legs for he original JT-5 autogyro. A similar approach is suitable for
the JT-15 but the wheels could be much smaller to be used by pushing the
copter from hangar to appron and back only.
Normal airplane type instruments could be used but a modern touch screen is lighter and easier to design for the electronic power system.
Weight estimate for the JT-15 multicopter:
| Electric Motors | 20 kg |
| 1,5 m dia Propellers 8 pcs, carbon composite | 20 kg |
| Tesla Batteries | 50kg |
| Control system | 7 kg |
| Cables | 10 kg |
| Steel tube airframe | 30 kg |
| Carbon composite cockpit | 20 kg |
| Plexiglass canopy | 10 kg |
| Landing gear | 20 kg |
| Instruments | 5 kg |
| Pilot |
80 kg |
| Total |
272 kg |
PERFORMANCE
The power loading and other parameters of the JT-15 would be similar to the built multicopters and, therefore, the expected performance would be similar, too. The available 80 kW of power would give a good rate of climb at or near full power for the few seconds needed and the cruising at about 100 km/h would be possible at only 25% power offering an endurance of 30 minutes. This is not very much but so many "breakthroughs" in battery energy density are advertised every year that sooner or later they will materialize in production batteries offering perhaps a one hour endurance for this type of a multicopter.
This improvement would make multicopters practical vehicles for short air trips and fun flying.
SAFETY
Safety is a big concern with all aircraft and especially so with multicopters. They do not have any kind of power off performance opposite to airplanes, helicopters and autogyros. The autorotation does not work with the small rotors of the multicopters. In addition the helicopters and multicopters have another serious safety problem, the vortex ring state of the rotors, where the rotorcraft loses the lift completely. This has been demonstrated with the small camera drones, too. Therefore a ballistic parachute system is often considered necessary for added safety.
COMMENTS are wellcome by email: